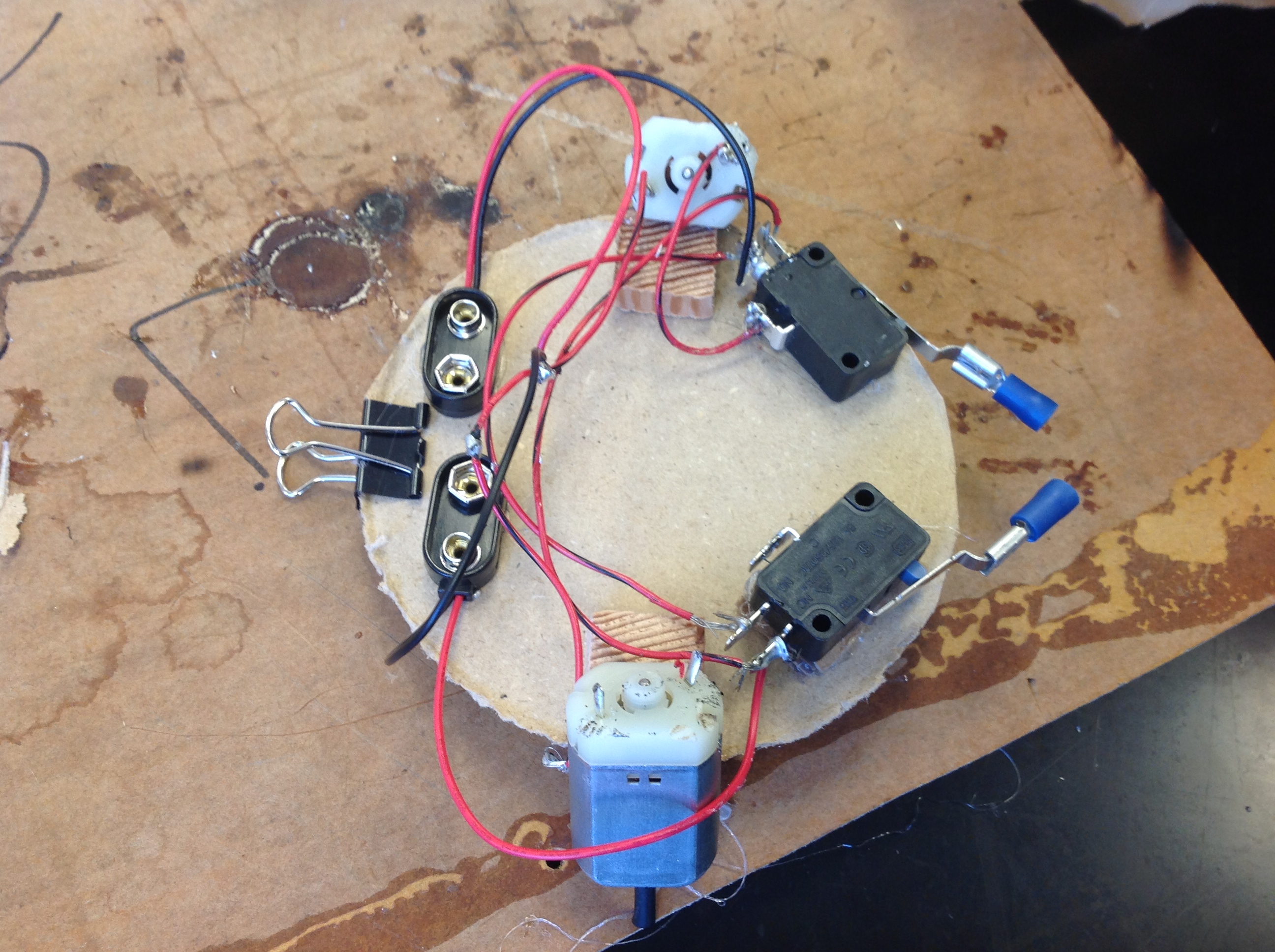
The main successes and failures of our project was the wiring. There were some wires where they would go to a different spot on each switch, but they would start at the same spot on each motor. This really confused me mainly, and because of that, we had to melt the solder on each of those spots. This was annoying, but it taught me and my partner how to problem solve when we messed up.
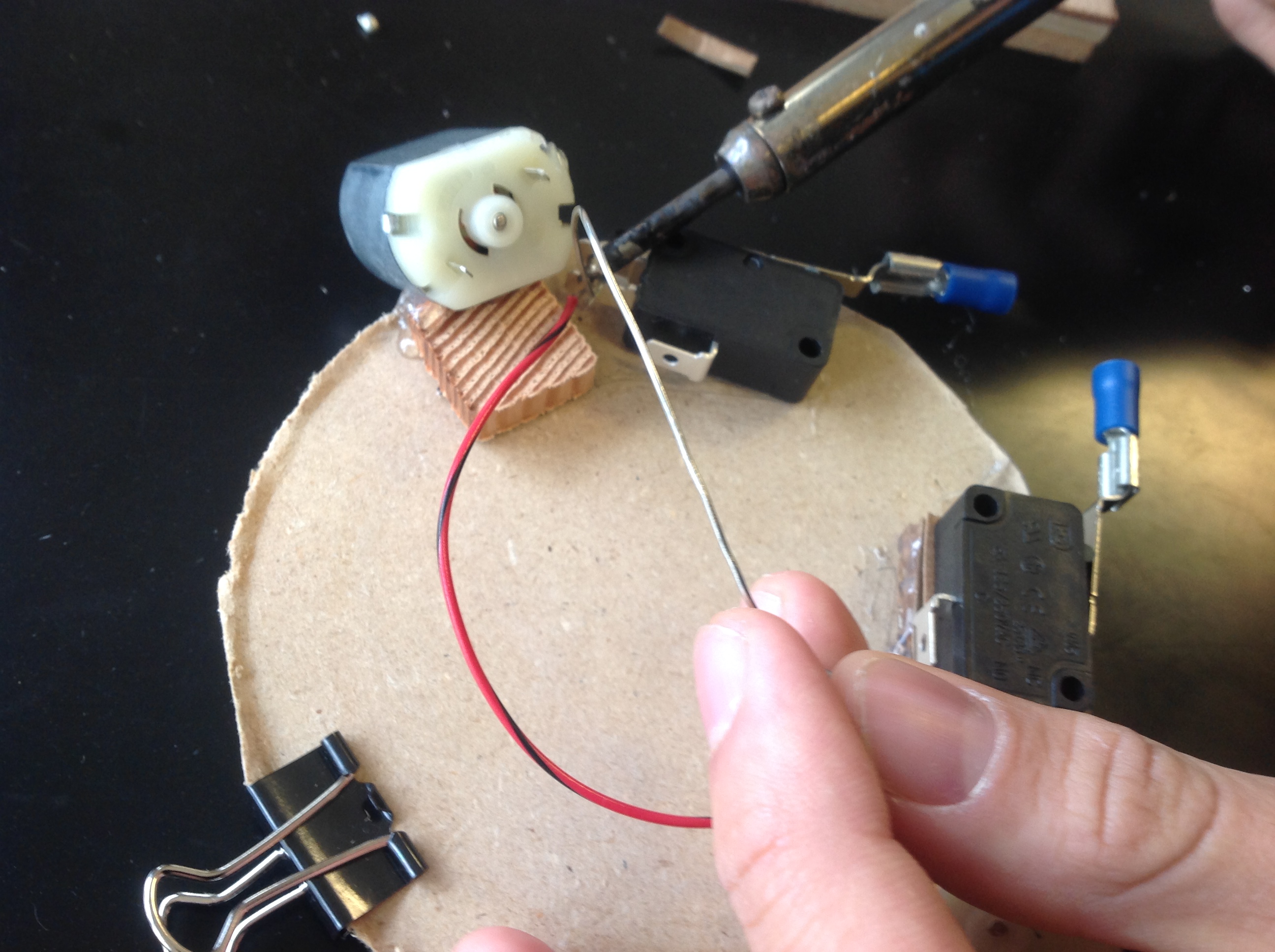
I learned a lot throughout this project. I learned how to solder, and how electrical motors and currents work. I think this was defiantly a fun project, because I learned important skills and understanding of how electricity works and transfers from batteries to different parts of a robot.
If I were to do something differently next time, I think I would look at the diagram more closely. That was my major flaw, because I did not look closely enough at the diagram. It caused us to have to make multiple wiring re makes, which, though it isn’t bad, it was annoying to some extent.
The parts I liked about this project were almost everything. I loved being able to work with my friends, have fun, and build a unmanned robot. If there was one thing I could change, I would probably want to be a 3 person group with one of my other friends, or maybe build a more complex robot. Other than those things, it was a great, fun project to do!